Simulation d’écoulement à la surface libre avec des particules suivant la méthode Smoothed-Particles Hydrodynamics
Ce projet académique, réalisé en Java à l'ENSMM, consistait à développer une
simulation d'écoulement de fluide en surface libre en utilisant la méthode
Smoothed-Particles Hydrodynamics (SPH).
Le défi principal n'était pas l'implémentation de la physique, mais l'
optimisation algorithmique. J'ai dû modéliser et suivre le comportement
de toutes les particules en limitant au maximum la complexité des calculs pour
garantir une simulation fluide et performante. Ce travail illustre ma capacité
à gérer des problèmes de performance complexes et à mettre en
œuvre des solutions basées sur des modèles mathématiques avancés.
Documents disponibles :
- Analyse de performance : Vidéo de la simulation avec paramètres par défaut.
- Maîtrise des paramètres physiques : Vidéo illustrant la modification de la viscosité.
- Tests de robustesse : Vidéo montrant l'application à une configuration initiale différente.
- Interface Utilisateur (UI) : Image du menu de paramétrage du simulateur.
- Rapport Technique (PDF) : Document détaillant la méthodologie et les choix techniques.
Vidéo de la simulation avec paramètres par défaut. Téléchargement : MP4
Vidéo illustrant la modification de la viscosité. Téléchargement : MP4
Vidéo montrant l'application à une configuration initiale différente. Téléchargement : MP4
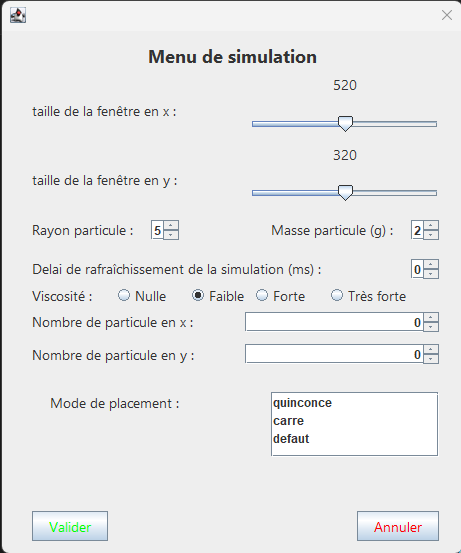
Image du menu du logiciel de simulation
Simulation d’écoulement à la surface libre avec des particules suivant la méthode Smoothed-Particles Hydrodynamics
Ce projet académique, réalisé en Java à l'ENSMM, consistait à développer une
simulation d'écoulement de fluide en surface libre en utilisant la méthode
Smoothed-Particles Hydrodynamics (SPH).
Le défi principal n'était pas l'implémentation de la physique, mais l'
optimisation algorithmique. J'ai dû modéliser et suivre le comportement
de toutes les particules en limitant au maximum la complexité des calculs pour
garantir une simulation fluide et performante. Ce travail illustre ma capacité
à gérer des problèmes de performance complexes et à mettre en
œuvre des solutions basées sur des modèles mathématiques avancés.
Documents disponibles :
- Analyse de performance : Vidéo de la simulation avec paramètres par défaut.
- Maîtrise des paramètres physiques : Vidéo illustrant la modification de la viscosité.
- Tests de robustesse : Vidéo montrant l'application à une configuration initiale différente.
- Interface Utilisateur (UI) : Image du menu de paramétrage du simulateur.
- Rapport Technique (PDF) : Document détaillant la méthodologie et les choix techniques.
Robot de compétition pour l'association de robotique
Ce projet, démarré il y a deux ans au sein de l'association de robotique,
visait la participation à la Coupe de France de Robotique-Eurobot.
Le challenge initial fut de structurer une équipe sans expérience préalable
en gestion de projet ni en robotique, nécessitant l'établissement d'un cahier
des charges rigoureux et le surmontage des difficultés de prototypage
(capteurs, pièces défaillantes).
Actuellement relancé, l'objectif se concentre sur l'intégration d'une
commande par vision. Ce volet met en application les connaissances
acquises en cours pour développer des systèmes de commande intelligents et
démontre une approche itérative face aux défis techniques.
Illustrations du projet :
- Une photo de la vue globale du robot ;
- Une photo du dessous du robot ;
- Une photo montrant l'entièreté des composants intérieur du robot en vrac ;
- Une vidéo du robot en fonctionnement ;

Image du robot dans sa globalité.

Image du dessous du robot : motorisation et roues.
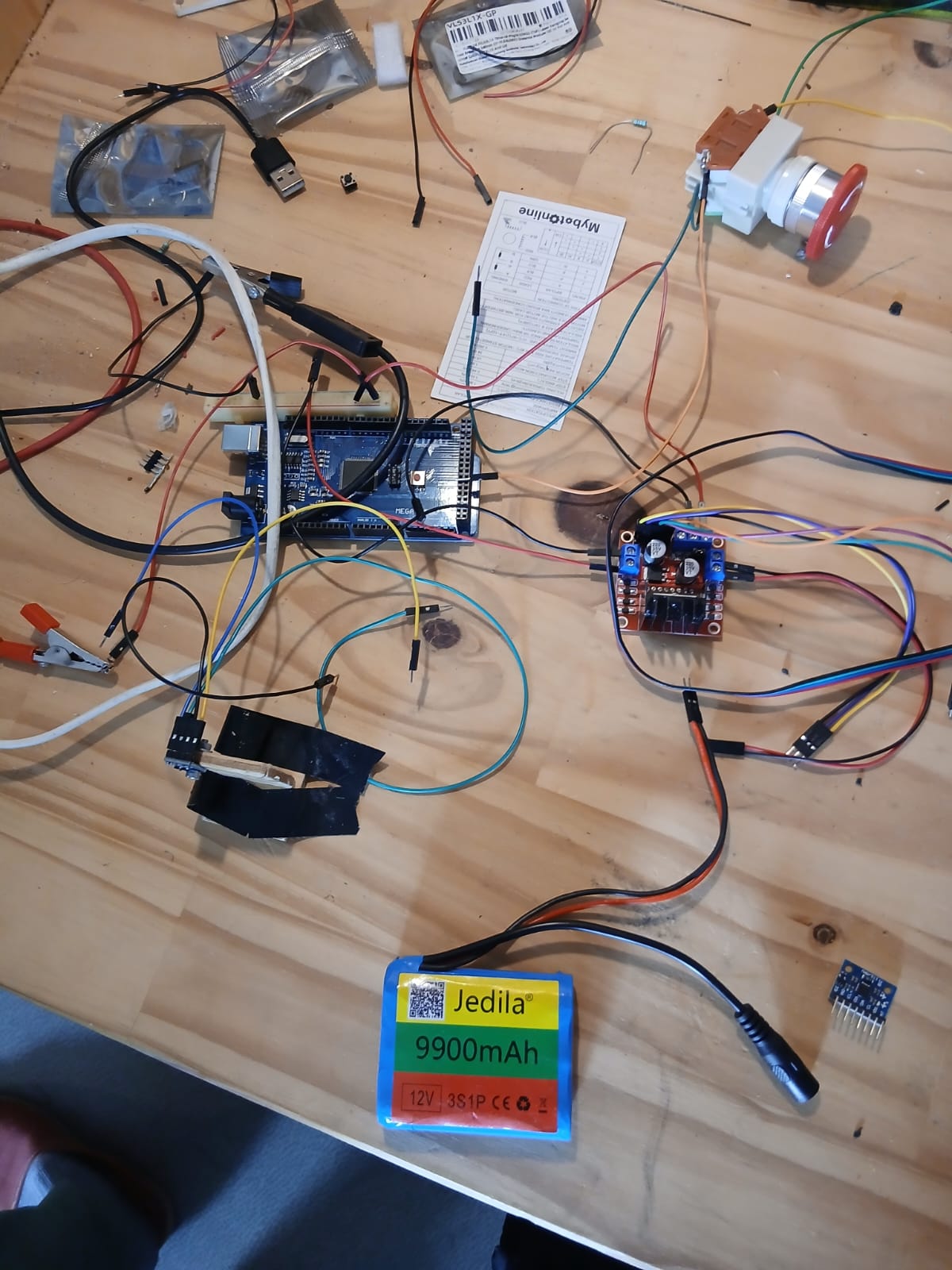
Image des composant du robots étalés sur la table.
Vidéo montrant l'application à une configuration initiale différente. Téléchargement : MP4
Robot de compétition pour l'association de robotique
Ce projet, démarré il y a deux ans au sein de l'association de robotique,
visait la participation à la Coupe de France de Robotique-Eurobot.
Le challenge initial fut de structurer une équipe sans expérience préalable
en gestion de projet ni en robotique, nécessitant l'établissement d'un cahier
des charges rigoureux et le surmontage des difficultés de prototypage
(capteurs, pièces défaillantes).
Actuellement relancé, l'objectif se concentre sur l'intégration d'une
commande par vision. Ce volet met en application les connaissances
acquises en cours pour développer des systèmes de commande intelligents et
démontre une approche itérative face aux défis techniques.
Illustrations du projet :
- Une photo de la vue globale du robot ;
- Une photo du dessous du robot ;
- Une photo montrant l'entièreté des composants intérieur du robot en vrac ;
- Une vidéo du robot en fonctionnement ;
Micro-Projet : Conception et Commande d'un Vertibot (Pendule Inversé)
Le vertiBOT est un système par nature instable (pendule inversé),
rendant les méthodes classiques de conception de correcteurs PID inapplicables.
Ce projet intensif d'une semaine a exigé une autonomie sur l'ensemble de
la chaîne de valeur : du prototypage électronique à la
programmation de la commande sur système réel (Arduino). Le succès
reposait sur une stratégie d'ajustement empirique et itérative des paramètres
de commande pour atteindre et maintenir l'équilibre vertical. Il s'agit d'une
preuve concrète de ma capacité à aborder et à résoudre des problèmes
d'automatisme complexes dans un environnement contraint (temps, matériel).
Matériel utilisé :
- Microcontrôleur Arduino MKR Zero (programmation embarquée).
- Centrale inertielle MPU6050 (gestion des données capteurs).
- Moteurs à courant continu et électronique de puissance.
- Batterie LiPo (gestion de l'énergie).
- Structure de vertiBOT (plaque + roues + décoration).
- De la petite électronique.
Vidéo illustrant la modification de la viscosité. Téléchargement : MP4
Micro-Projet : Conception et Commande d'un Vertibot (Pendule Inversé)
Le vertiBOT est un système par nature instable (pendule inversé),
rendant les méthodes classiques de conception de correcteurs PID inapplicables.
Ce projet intensif d'une semaine a exigé une autonomie sur l'ensemble de
la chaîne de valeur : du prototypage électronique à la
programmation de la commande sur système réel (Arduino). Le succès
reposait sur une stratégie d'ajustement empirique et itérative des paramètres
de commande pour atteindre et maintenir l'équilibre vertical. Il s'agit d'une
preuve concrète de ma capacité à aborder et à résoudre des problèmes
d'automatisme complexes dans un environnement contraint (temps, matériel).
Matériel utilisé :
- Microcontrôleur Arduino MKR Zero (programmation embarquée).
- Centrale inertielle MPU6050 (gestion des données capteurs).
- Moteurs à courant continu et électronique de puissance.
- Batterie LiPo (gestion de l'énergie).
- Structure de vertiBOT (plaque + roues + décoration).
- De la petite électronique.